물리학
## 물리학 조정
시스템 전체 물리학 설정
시스템 전체 물리학 설정은 설정 -> 옵션 -> 물리학에서 찾을 수 있습니다.
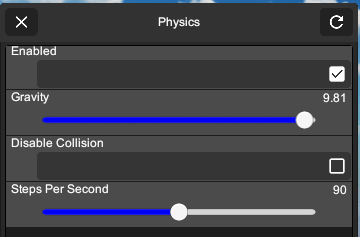
- 활성화
- 물리 시뮬레이션을 켜거나 끕니다.
- 중력
- 중력 힘을 변경합니다. 음수로 설정하면 중력 방향이 반대로 됩니다.
- 충돌 비활성화
- 모델 부품 간의 충돌을 제어합니다. 모델에는 두 가지 유형의 충돌체가 있습니다. 유형 A는 팔과 다리와 같이 애니메이션과 함께 움직이는 부품이고, 유형 B는 보통 하나 이상의 조인트로 다른 부품과 연결된 자유롭게 움직이는 부품입니다. 기본적으로 유형 B는 유형 A와 충돌하지만 “충돌 비활성화”를 켜면 유형 B 객체는 더 이상 유형 A 객체와 충돌하지 않고 통과합니다.
- 초당 단계 수
- 물리 시뮬레이션은 일정한 간격으로 계산되며, 고정된 간격이 가장 잘 작동합니다. 이 옵션은 1초 동안 수행되는 시뮬레이션 횟수를 제어합니다. 횟수가 많을수록 좋지만, 너무 많은 단계는 FPS를 늦출 수 있습니다. 원활한 애니메이션을 위해 FPS와 일치시키는 것이 가장 좋습니다.
PMX 모델별 물리학 설정
모델별 물리학 설정은 모델 설정 -> 옵션 -> 물리학에서 찾을 수 있습니다.
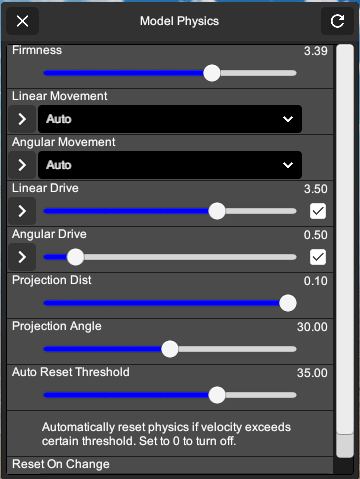
- 단단함
- 모든 조인트의 스프링 힘에 적용되는 전체적인 곱셈기입니다. 값이 증가하면 움직임이 줄어듭니다. 이 설정 아래에서 선형 및 각도 움직임에 대한 스프링 힘을 개별적으로 제어할 수 있습니다.
- 선형 움직임
- 모든 조인트에 대한 선형 움직임 제한 방식을 선택합니다. 자동으로 모델에서 정의된 선형 제한에 따라 제한이 설정됩니다. 제한이 작은 경우 잠길 것이고, 그렇지 않으면 제한이 설정됩니다. “탄력성”은 제한 범위의 가장자리에 도달하고 튕겨 나올 때 보존되는 속도를 조절합니다. “접촉 거리”는 제한 범위에 가까워질 때 제한 스프링 힘을 적용할 때 결정됩니다. 0은 실제로 제한에 도달할 때까지 자유롭게 움직이고, 1은 제한 범위 내에 있을 때 항상 힘이 적용됨을 의미합니다.
- 각도 움직임
- 위의 선형 움직임과 유사하게, 이 옵션은 모든 조인트의 각도 움직임을 제어합니다.
- 선형 드라이브
- 연결된 객체가 원래 위치로 돌아가기 위해 사용되는 스프링 힘의 양을 제어합니다. 여기서 “대상” 설정은 중립 위치가 어디인지를 제어합니다.
- 각도 드라이브
- 객체가 자신의 방향으로 돌아가도록 하는 힘을 제어합니다.
- 프로젝션 거리
- 프로젝션 거리입니다. 두 개의 연결된 객체 사이의 거리가 여기에 정의된 값보다 크면 객체가 이탈을 피하기 위해 다시 이동됩니다.
- 프로젝션 각도
- 위와 유사하게, 이 옵션은 회전을 제어합니다.
- 변경 시 재설정
- 이 옵션을 토글하면 여기서 변경 사항이 발생할 때마다 모든 본이 새로운 설정 값이 적용되기 전에 초기 위치로 재설정됩니다. 이렇게 하면 물리학 설정을 변경하는 동안 본이 이탈되는 것을 방지할 수 있습니다. 그러나 때로는 변경 사항의 효과를 관찰하기 어려울 수 있으므로 이 옵션을 변경하기 전에 변경 사항을 찾은 후 다시 켜는 것이 좋습니다.
움직임 및 드라이브 설정 내에서 일부 공통 설정 값이 있습니다.
- 스프링 힘
- 후크의 법칙에 따라 힘을 계산하는 데 사용됩니다.
- 감쇠 / 드래그
- 현재 속도에 비례하여 움직임을 멈추기 위해 적용되는 힘의 양을 조절합니다.
XPS 모델별 물리학 설정
XPS 모델에는 물리학 정의가 포함되어 있지 않기 때문에 프로그램은 어디에 물리학 구성 요소를 추가해야 하는지 알지 못합니다. 이를 해결하기 위해 각 XPS 모델에 여러 물리학 설정이 추가되어 있으며, 이를 통해 XPS 모델에서 물리학 구성 요소를 구성할 수 있습니다.
본 충돌체
이 설정은 일반적인 신체 부위에 충돌체를 생성하여 다른 물리학 객체와 상호 작용할 수 있도록 합니다. 슬라이더를 사용하여 크기를 모델 신체에 맞게 변경할 수 있습니다.
가슴 물리학
기본적으로 이 설정은 켜져 있지만 올바른 가슴 관련 본을 설정에서 선택하기 전까지는 아무런 효과가 없습니다. 일반적으로 이 본들은 torso2의 자식 본이며, 각각 한쪽에 하나씩 있습니다.
- 스프링, 질량, 감쇠
- 조인트의 물리학 속성을 제어합니다.
- 제한
- 부모 본으로부터 얼마나 회전할 수 있는지를 제어합니다.
- 반중력
- 선택한 각도에 따라 가슴을 위로 들어올립니다.
- 충돌체 반지름
- 충돌체의 크기를 제어합니다. 모델과 일치하는 값을 설정하는 것이 좋습니다.
- 앵커 및 중심
- 조인트의 위치를 제어합니다.
머리카락 물리학
가슴 설정과 유사하게, 작동하려면 본을 선택해야 합니다. 일반적으로 이 본들은 머리의 자식 본입니다. 때로는 올바른 본을 찾기 위해 약간의 탐색이 필요할 수 있습니다. 물리학 구성 요소를 생성하는 방법은 선택한 본에서 시작하여 모든 자식 본과 그들의 자식 본들을 연결하여 조인트와 충돌체의 트리 구조를 형성하는 것입니다.
- 충돌체 반지름
- 충돌체는 원통 모양이며, 충돌체 반지름은 직경을 제어합니다.
- 첫 번째 X개의 본 건너뛰기
- 이 옵션을 사용하면 “트리”를 생성할 때 처음 X개의 본을 건너뛰도록 프로그램에 지시할 수 있으므로 복수의 본을 선택하지 않아도 됩니다.
옷 물리학
머리카락 물리학과 유사하지만 “트리”의 가지들 사이에 수평 연결도 생성되어 “메시”를 형성합니다.